20. RealFlow Control AI: Sub-Millisecond Physics-TML Fusion
RealFlow Control AI** represents a paradigm shift in industrial process monitoring. It is the first production-ready framework to achieve sub-millisecond carryover predictions across 150-vessel fleets at SCADA clock rates.
By fusing high-fidelity quadrature physics with Transactional Machine Learning (TML), RealFlow eliminates the “Latency-Trust Gap” inherent in traditional Digital Twins.
Tip
Watch the RealFlow AI YouTube video
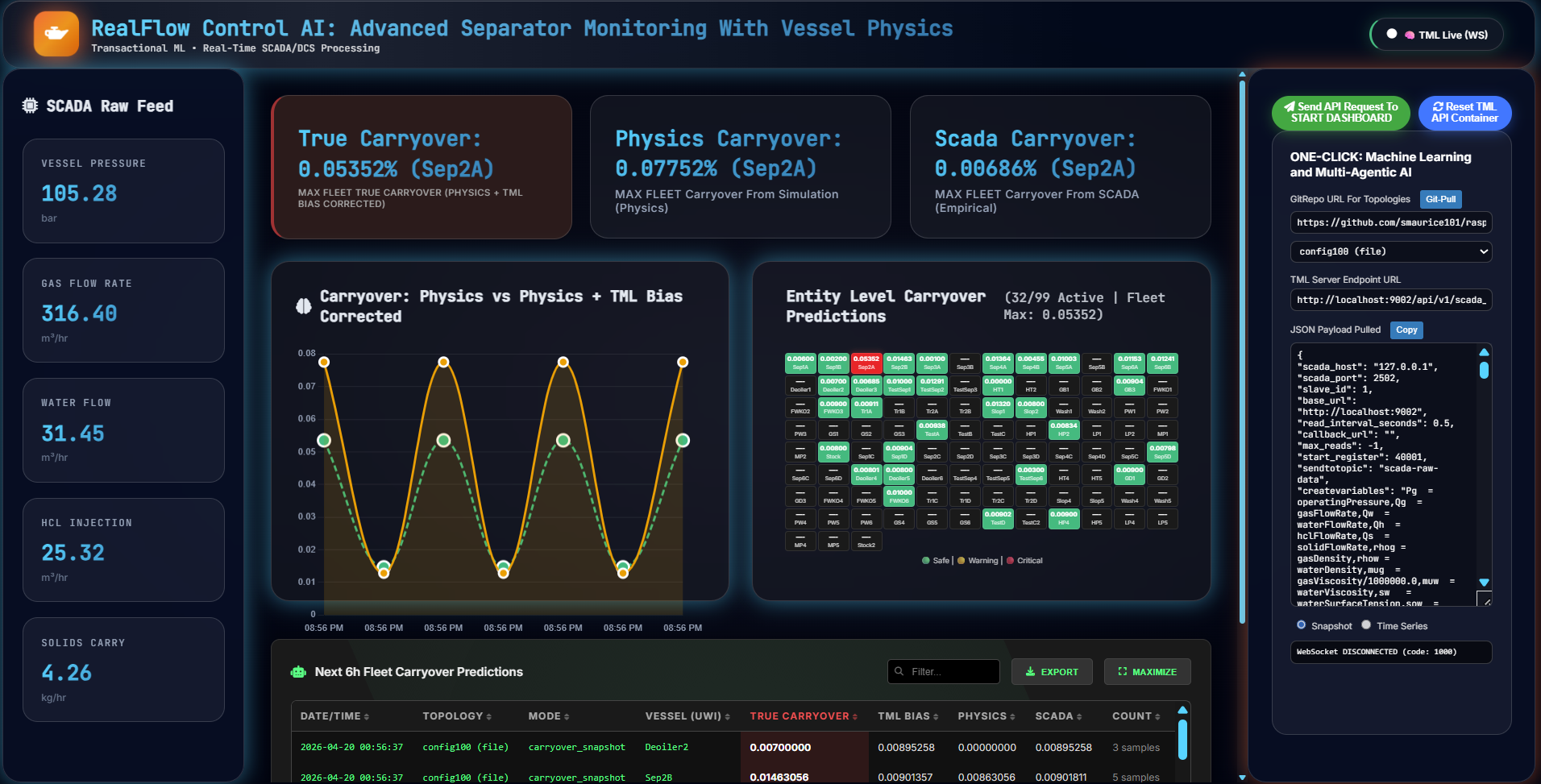
20.1. RealFlow Control AI Dashboard
All functionality for carryover prediction and monitoring, as well as machine learning, AI, and Multi-Agentic AI is done through this dashboard.
To run this dashboard technology you will need:
TML Server API Docker Container
TML Server handles all computations including running the TML simulator for the Physics
Live connection to SCADA system (or any system capturing vessel data)
This Dashboard URL (Contact info@otics.ca for more details)
20.2. Why RealFlow?
20.2.1. 12,500x Computational Speedup
Traditional CFD (Computational Fluid Dynamics) is too slow for real-time control. RealFlow delivers full transient multiphysics 12,500x faster than ANSYS Fluent baselines. While SCADA updates every 100ms, our TML Simulator completes a fleet calculation in 0.12ms (8,006 Hz).
20.2.2. The Global Bias Ledger
RealFlow doesn’t just predict; it learns. We isolate unmodeled physical entropy (like sensor drift or internal scaling) into a Global Bias Ledger. This ledger allows the system to identify “mathematical fingerprints” of failures and broadcast “immunization” data across the entire Kafka network.
20.2.3. Green AI Architecture
High-performance intelligence shouldn’t require a power plant.
Low Memory: Monitors 150 vessels on just 4 GB of RAM.
Edge Ready: Runs on standard CPUs at <15 Watts, eliminating the need for expensive GPU clusters.
20.3. Core Methodology: The Fusion Framework
RealFlow operates on a deterministic hybrid model. The “True Carryover” (\(\Gamma_{true}\)) is the convergence of physical law and machine learning adaptation.
20.3.1. The Fusion Equation
The system calculates the final state by solving:
Where:
\(\Psi_{phys}\): High-speed quadrature physics kernel.
\(\vec{P}, \vec{F}\): Live Pressure and Flow vectors from SCADA.
\(\delta(\epsilon)\): The TML Bias—a learned residual capturing real-world drift.
20.4. Technical Deep Dive
20.4.1. Sub-Millisecond Quadrature Physics
To maintain speed without sacrificing accuracy, RealFlow utilizes Numba JIT-compiled Gauss-Legendre Quadrature. The droplet separation efficiency (\(\eta\)) is integrated over the droplet size distribution:
20.5. Self-Healing Gaussian Processes
The TML layer utilizes a Hierarchical Gaussian Process (HGP) to minimize variance between the physical model and real-world outcomes. This allows the system to “self-heal” when sensors begin to drift.
20.6. Dashboard Operations
1. High-Level KPI Matrix
Max Fleet True Carryover: The corrected risk value (Physics + Bias).
Max Fleet Sim Carryover: The raw theoretical value.
Max Fleet SCADA Carryover: The empirical value from the DCS.
2. Dynamic Telemetry Matrix
The dashboard features a searchable, sortable Level 5 Diagnostic Table.
Dynamic Loading: Ingests JSON payloads on-the-fly via WebSocket.
Exportable Data: One-click CSV export for high-precision audit trails.
Sorting: Instantly rank the fleet by “True Carryover” to identify at-risk assets.
3. GitPull Topology Integration
RealFlow treats industrial hardware as code. Use the Git Pull interface to update vessel configurations (Topologies) via GitHub. The system re-compiles the physics threads in real-time without stopping the data stream.
20.7. Level 5 Autonomous Control
RealFlow moves beyond monitoring into Deterministic Control. By calculating the Control Action Probability (\(P_{act}\)), the system can automatically adjust DCS setpoints via JSON-RPC:
This allows for a fully closed-loop plant where the AI prevents carryover events 6 hours before they occur.
To minimize the variance between the physical model and real-world outcomes, we apply:
20.8. Getting Started
Contact Otics Advanced Analytics: info@otics.ca
To deploy RealFlow Control AI:
You MUST run the TML API server: Found here
Then Run the RealFlow Dashboard
Pull Topology: Connect your GitHub repo containing vessel config.json files.
Stream SCADA: Point the dashboard to your TML/Kafka server endpoint.
Calibrate: Monitor the green dashed “Bias” line in the trend chart to verify model convergence.
© 2026 Otics Advanced Analytics. Built for Level 5 Autonomous Operations.